
Neskaidras loģikas robotika
Sākot no CAD izstrādes līdz kontrolei ar vienu programmatūru
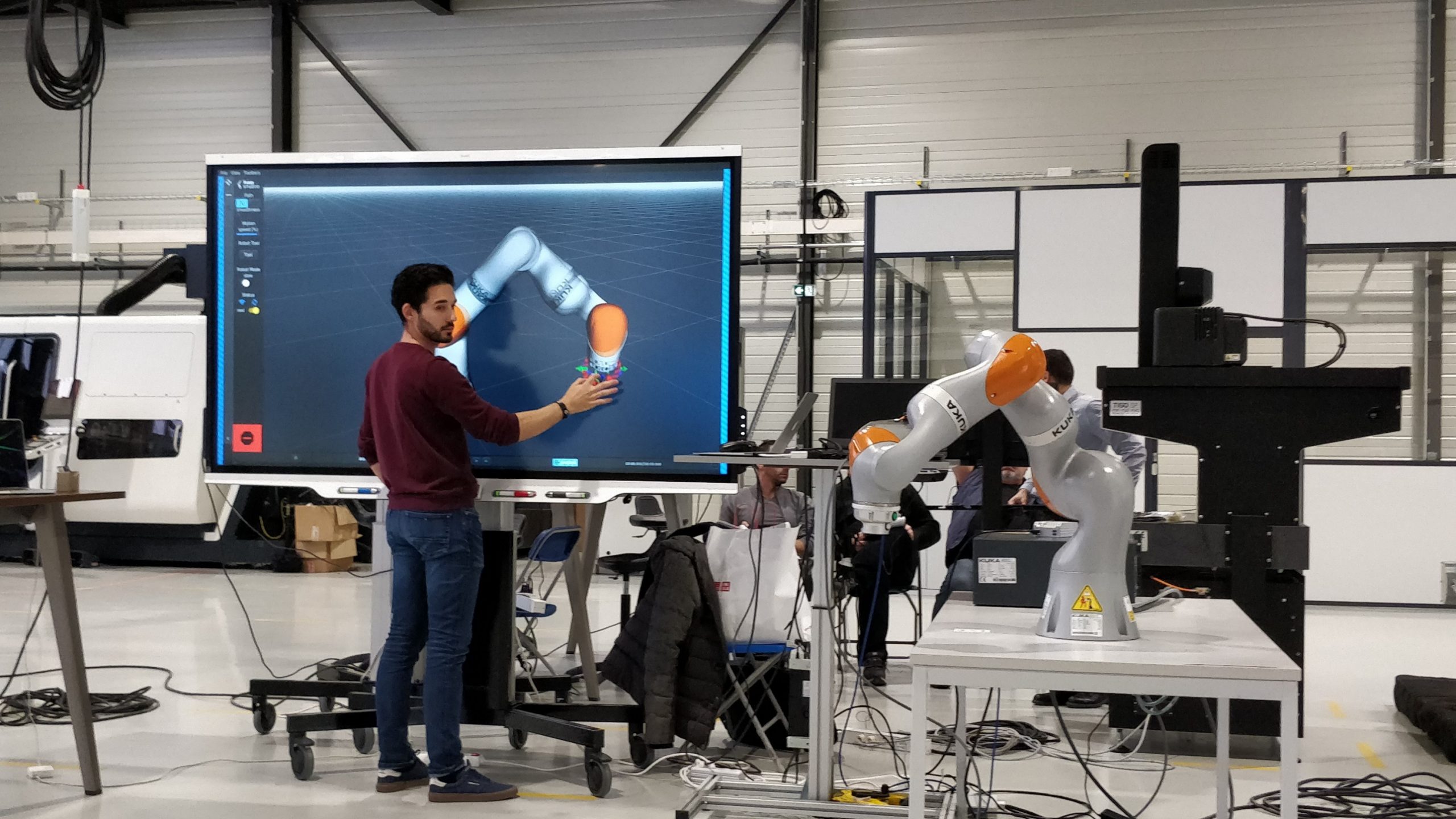
Neskaidras loģikas robotika paziņo par pirmās versijas prezentāciju Neskaidra studija™ izstādē Hannover Messe Industry 2021, kas iezīmēs pagrieziena punktu elastīgu robotu ražošanā.
➔ Velkot un nometot CAD daļas uz jūsu 3D digitālā dvīņa, sarežģītie celiņi tiek automātiski ģenerēti un ar vienu klikšķi nosūtīti ražošanas robotam. Visi ar universālu programmatūras platformu.
➔ No bezsaistes simulācijas līdz reāllaika kontrolei - programmatūra Neskaidra studija™ novērš plaisu starp simulāciju un realitāti, lai samazinātu dīkstāves laiku un optimizētu robotikas darbplūsmu.
➔ Izstrādāts jau no paša sākuma, lai dramatiski samazinātu robotikas prasību, pateicoties reālā laika digitālo dvīņu tehnoloģijai bez koda.
➔ Varat pārslēgties starp jebkuru robota marku un modeli ar diviem klikšķiem, lai atrastu pareizo iespēju savai lietojumprogrammai, bez nepieciešamības mainīt programmatūru vai atkārtot laikietilpīgus projektēšanas uzdevumus.
➔ Tas kontrolē pat vissarežģītākās robotizētās lietojumprogrammas un ir pieejams visu lielumu uzņēmumiem.
Grūtības līdz mūsdienām
Gan rūpnieciskie, gan sadarbības roboti ir ļoti dārgi, lai sasniegtu patiesi elastīgu ražošanu programmatūras sarežģītības un integrācijas dēļ. Pašlaik tikai daži apstrādes lietojumprogrammas, piemēram, pick-and-place, ir patiesi pieejami ekspertiem, kuri nav eksperti, un tāpēc tie ir rentabli elastīgai ražošanai.
Tomēr lielākajai daļai robotikas un kobotikas lietojumu ir nepieciešami sarežģīti un neviendabīgi programmatūras rīki, kā arī zīmola eksperti. Šie rīki prasa ievērojamu apmācību un pieredzi.
Rezultāts ir tāds, ka vairāk nekā 75% no kopējām robota īpašumtiesībām (TCO) ir saistīti ar apmācību un programmatūras pakalpojumiem standarta masveida ražošanai. Elastīgā ražošanā šis skaitlis var pieaugt virs 90% no TCO un tādējādi iznīcināt potenciālo ieguldījumu atdevi robotu sistēmā.
Risinājums: intuitīva platforma visiem soļiem
Neskaidra studija™ ir universāla un intuitīva programmatūras platforma, kas robotu programmēšanas izmaksas samazina par desmito daļu. Izmantojot Fuzzy Studio ™, jebkuru rūpnīcu var ātri, viegli un izmaksu ziņā efektīvi automatizēt, pat izmantojot sarežģītas apstrādes, izsniegšanas un metināšanas programmas.
➔ Intuitīva un vienkārša kā videospēle
➔ Standarta saskarne visiem robotu zīmoliem
➔ Rūpnieciska līmeņa precizitāte un veiktspēja reāllaika robotu vadībai
Fuzzy Studio ™ aptver visus robotu šūnu dzīves posmus, sākot no projekta sagatavošanas, projektēšanas un nodošanas ekspluatācijā līdz reāllaika ražošanas kontrolei, tiešsaistes pārprogrammēšanai un uzturēšanai.
Paredzēts, lai paātrinātu robotikas ieviešanu un izmantošanu visās ieinteresētajās pusēs, sākot no lielākajiem ražotājiem līdz maziem un vidējiem uzņēmumiem, sistēmu integratoriem un pat OEM robotu ražotājiem.

Atlasiet robotus no plašas bibliotēkas
Pārlūkojiet pilnu robotu modeļu kolekciju no atbalstītajiem zīmoliem un filtrējiet pēc funkcijām.
Importējiet CAD un 3D failus ar vieglumu
Ātri izveidojiet robotizētu sistēmu ar augstas precizitātes interaktīviem 3D un CAD objektiem. Atbalstītie formāti: vairāk nekā 40 formāti, ieskaitot rūpnieciskos CAD STEP un IGES.
Atrodiet labās rokas gala rīku
Atlasiet no vairākām galvenajām ražotāja rīku opcijām vai importējiet pielāgotos rīkus. Visi atbalstītie rīki ir saderīgi ar plug and play.
Veidojiet un modificējiet rīkjoslas vizuāli
Nav mulsinošu kodu vai koordinātu sistēmu rindu. Vizuāli izveidojiet rīku ceļus. Mainīt trajektorijas reāllaikā un redzēt izmaiņas 3D formātā.
Automātiska trajektorijas ģenerēšana, velkot un nometot
Velciet un nometiet 3D CAD objektus projektēšanā, un patentētie algoritmi automātiski ģenerēs rīku ceļus, izvairoties no sadursmēm, ietaupot laiku, palielinot veiktspēju un uzlabojot drošību. Tirdzniecības stundas ar rūpīgu darbu ar dažiem vienkāršiem klikšķiem.
Izveidojiet pilnīgu procesu bez koda
Organizējiet darbarīkus, rīkus, sensorus un sinhronizējiet I / O. Kods nav jāraksta.
Pārslēdziet robotus un turpiniet strādāt
Pateicoties patentētiem algoritmiem, lietotāji var pārslēgties starp robotiem, veicot divus klikšķus uz dizaina, lai atrastu viņu darbam piemērotāko. Visas trajektorijas un procesi tiek automātiski pārrēķināti, un nesaderības var viegli izlabot.
Instalēšana ar vienu klikšķi
Pateicoties reāllaika deterministiskās vadības algoritmiem, “tas, ko jūs redzat simulācijā, ir tas, ko jūs saņemat patiesībā”. Pilnu lietojumprogrammu var instalēt ar vienu klikšķi uz ražošanas robota un pārvarēt plaisu starp simulāciju un realitāti. Procesi tiek uzraudzīti un pielāgoti tieši un reāllaikā.
Par neskaidras loģikas robotiku
Neskaidras loģikas robotika Tas izauga no Francijas vadošajiem robotikas pētniecības institūtiem, un to dibināja Francijas un Amerikas robotikas ekspertu komanda, kas ieraudzīja jaunu veidu, kā kontrolēt un programmēt nākamās paaudzes robotikas lietojumus. Pateicoties vecam klientam audiovizuālajā nozarē, dibinātāji izveidoja pilnīgi jaunu risinājumu, lai nepieredzējuši lietotāji varētu mijiedarboties, kontrolēt un programmēt rūpnieciskos robotus sarežģītām lietojumprogrammām, kuras veic jebkurš robots. Viņu pieredze ļāva viņiem nodot šo jauninājumu nozarei.

Mūsu redzējums
No Geofumadas mēs esam priecīgi sniegt jums visus jaunumus, kas saistīti ar ģeogrāfisko pasauli. Šajā gadījumā Fuzzy Logic Robotics piedāvā risinājumu, kas atvieglo CAD datu pārvaldības procesus līdz robotu reāllaika kontrolei. Tas neapšaubāmi tuvina mūs vēlmēm 4. rūpniecības revolūcijā, kur procesi tiek automatizēti un tiek radīti nepieciešamie resursi labākai laika vadībai. Fuzzy Studio misija ir atvieglot nākamo robotu automatizācijas revolūciju, risinot problēmas un pārveidojot veidu, kā cilvēki mijiedarbojas ar robotiem. Mēs aicinām jūs apmeklēt Fuzzy Logic Robotics vietni, lai iegūtu vairāk informācijas, sazinieties ar viņiem vietnē ryan@flr.io anthony.owen@flr.io. Mēs būsim informēti par šī risinājuma attīstību, lai sniegtu jums visu informāciju no pirmavotiem.



